
- Inicio
- Products
- Motor sin escobillas
- Motor DC sin escobillas de 32mm con rotor exterior FL32BLW
Motor DC sin escobillas de 32mm con rotor exterior FL32BLW

Aplicaciones:
La serie de motores DC sin escobillas con rotor externo FL32BLW se puede usar en robots, vehículos de guiado automático, equipos VR, torniquetes, cafeteras, etc.
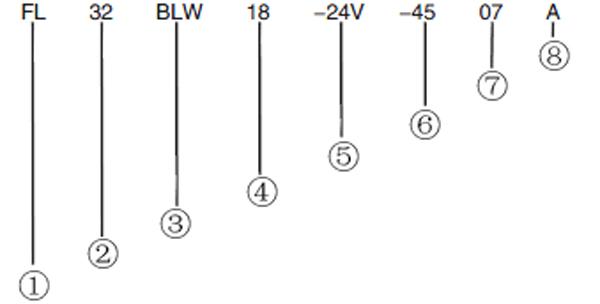 ①Fulling Motor; ② diámetro del motor: 32mm; ③ motor sin escobillas con rotor exterior;
①Fulling Motor; ② diámetro del motor: 32mm; ③ motor sin escobillas con rotor exterior;④ longitud del motor: 18mm; ⑤ voltaje nominal: 24V;
⑥ 1% de velocidad sin carga; ⑦ potencia nominal: 7W; ⑧ un solo eje (A), doble eje (B)
| Modo de conexión de las bobinas | Conexión en estrella |
| Ángulo de distribución de Hall | Ángulo eléctrico de 120 grados |
| Juego radial | 0.02mm a 4N |
| Juego axial | 0.14mm a 4N |
| Fuerza radial máxima | 14N |
| Fuerza axial máxima | 4.8N |
| Clase de aislamiento | Clase B |
| Resistencia dieléctrica | 500 V AC en un minuto |
| Resistencia de aislamiento | 100MΩ Min., 500V DC |
| Conector | Número de pines | Función | Observaciones |
| FPC | 1 | Vcc | Hall VCC: +5VDC--+24VDC |
| 2 | Hall C | ||
| 3 | Hall A | ||
| 4 | Hall B | ||
| 5 | GND | Hall GND | |
| 6 | Fase W | ||
| 7 | Fase V | ||
| 8 | Fase U |
| Unidad | Tolerancia | FL32BLW18-9V-3706A | FL32BLW18-12V-4607A | FL32BLW18-24V-4507A | FL32BLW18-48V-4808A | |
| Número de polos | 8 | 8 | 8 | 8 | ||
| Número de fases | 3 | 3 | 3 | 3 | ||
| Voltaje nominal | VDC | 9 | 12 | 24 | 48 | |
| Velocidad sin carga | RPM | ±10% | 3750 | 4650 | 4550 | 4800 |
| Corriente sin carga | A | 0.252 | 0.29 | 0.14 | 0.077 | |
| Corriente nominal | A | 1.06 | 1 | 0.5 | 0.257 | |
| Velocidad nominal | RPM | ±10% | 2100 | 2800 | 2760 | 2950 |
| Par nominal | mN·m | 24.6 | 25.1 | 25.5 | 24.7 | |
| Potencia nominal | W | 6 | 7 | 7 | 8 | |
| Par máximo | mN·m | 73.8 | 75.3 | 76.5 | 74.1 | |
| Corriente máxima | A | ±10% | 3.4 | 3.2 | 1.7 | 0.97 |
| Resistencia fase a fase | Ω at 25℃ | ±10% | 2.87 | 3.43 | 13.7 | 53 |
| Inductancia fase a fase | mH | ±20% | 1.61 | 1.87 | 7.73 | 27.8 |
| Par constante | mNm/A | ±10% | 23 | 24.8 | 51 | 96.1 |
| Constante de fuerza contraelectromotriz | Vrms/RPM | ±10% | 1.7 | 1.83 | 3.77 | 7.1 |
| Inercia del rotor | g·cm2 | 35 | 35 | 35 | 35 | |
| Peso | g | 50 | 50 | 50 | 50 |
Ventajas:
Comparado con el motor de rotor interno, nuestro motor sin escobillas con rotor exterior posee una estructura más compacta y una baja ondulación de par. Además, con el mismo volumen, produce un par motor más elevado.
Formulario de consultas
Changzhou Fulling Motor Co., Ltd.



